0 Preface
As the main component of intelligent transportation, in-vehicle navigation and positioning has become a recent research hotspot [1]. As the global positioning system (GPS) is converted from military to civilian, GPS technology has other unparalleled advantages in the monitoring of moving targets. Therefore, the use of GPS technology to monitor and dispatch various vehicles has become a new research hotspot.
GPRS can realize the real-time exchange of data, and according to the data flow rate, it is especially suitable for the occasion of frequent small-flow data transmission such as vehicle satellite positioning system. Therefore, this system uses GPRS as the communication method between the on-board computer and the server.
Due to the complex algorithm used for map matching, the topology of the road network must be database-based, and the entire positioning system must be implemented using high-level language programming. Based on these characteristics, the vehicle positioning device uses a single-board industrial control computer as the hardware platform, and the operating system uses Windows XP Embedded with SP2. Compared with other embedded operating systems such as Linux and Windows CE, the advantage of choosing embedded XP is that the existing programs on the user side do not need to be reprogrammed, while the programmers on the development side are already familiar with Windows-based programming and do not have to learn new ones. How to program under the operating system.
With the development of network technology and people's demand for vehicle positioning, there is an urgent need to use the Internet to query and locate designated vehicles, so that users can directly display the text and images to users by visiting the website of the vehicle navigation and positioning company. Web GIS is a GIS operating in the Internet environment, which is a new technology that uses Internet technology and WWW technology to improve and expand the traditional GIS functions. Therefore, how to use Web GIS technology combined with GPS technology to realize vehicle location query in the Internet environment is a very worthy issue and has practical significance.
1 The overall architecture of the system
1.1 The composition of the system
In vehicle positioning, the application system mainly includes the following four parts: vehicle-mounted GPS mobile terminal, GPRS communication network, vehicle service information center and user, as shown in Figure 1.
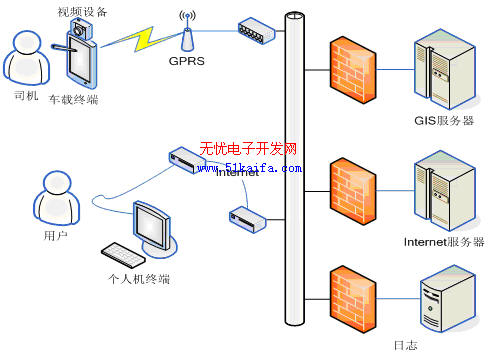
Figure 1 System composition diagram
1. 2 working principle
Among them, the vehicle GPS mobile terminal can provide the service center with the latest positioning data of the mobile target, the vehicle's running speed and direction, and transmit this information to the vehicle service information center through the wireless communication network GPRS, and the vehicle service information center through the wireless communication network GPRS Communicate with the car GPS mobile unit and talk to the customer via the Internet. After the client submits the vehicle positioning request, the vehicle service information center receives the request and sends a positioning instruction to the vehicle-mounted mobile unit through the wireless communication network GPRS, and then transmits the latest information of the vehicle to the vehicle service information center, and the service information center receives the new The vehicle information is drawn on the map and then sent back to the client as a webpage composed of text and pictures.
2 Construction of the hardware platform of the in-vehicle computer terminal
The in-vehicle computer terminal hardware platform uses AAEON's GENE-8310 development board as the platform. The development board is actually an embedded computer processing platform. Onboard Intel® Celeron® M 600MHz processor with powerful processing power. With good display support and rich interfaces. It is the best choice for customers with higher requirements such as excellent processing power under low power control. Especially because it is based on the Intel platform, software developed on ordinary computers can run on the platform without modification. Simplified programming workload. On the basis of the development board, the GPS and GPRS modules are expanded to form the hardware system of the on-board computer terminal.
3 Development and construction of vehicle operating system [2]
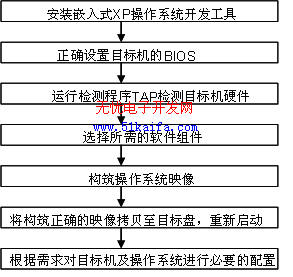
Figure 2 Embedded XP operating system development process
The on-board computer terminal software platform uses Windows XP Embedded with SP2 as the operating system. Windows XP Embedded is a componentized version of the desktop Windows XP operating system. It can quickly develop the most reliable full-featured connected devices. Windows XP Embedded uses the same binary code as Windows XP Professional, enabling embedded developers to select only those rich customization features required for embedded devices with small coverage. In this system, we chose a 512M CF card as the vehicle operating system and application software carrier, the operating system is controlled within 100M.
The development of the specific embedded XP operating system can be roughly divided into several steps, as shown in Figure 2. In view of the space, I won't make a detailed introduction here.
4 GPS data reception and optimization processing
The GPS receiving module adopts TFAG30 of Flying Eagle Company. The positioning information returned by the vehicle GPS mobile unit is data in the NMEA0813 standard format, among which $ GPGGA (prefix identifier), hhmmss.ss (time, hour, minute, second), bbbb , bbbb (latitude, degree, minute, minute, minute), N (north latitude, s guide latitude), IIII, IIII (longitude, degree, degree, minute, minute, minute), E (east longitude, w west longitude ), Q (1 indicates positioning mode GPS, 2 indicates DGPS), nn (number of satellites), P (horizontal positioning accuracy factor), h, h (antenna height at sea level), m., Gg (on the ellipsoidal surface) Antenna height), m, xxx (DGPS valid data period), aaaa (DGPS reference station number), ss (checksum), <CR> Enter
Because the received satellite data has ephemeris error, ionospheric error, tropospheric error and random noise, etc. In order to improve the positioning accuracy, it is necessary to process the satellite positioning data with a differential algorithm [4].
In order to eliminate the influence of random noise and dynamic noise on the positioning results, the positioning data must be filtered and smoothed before data processing. A description of the Kalman filtering method used is given below.
(1) Dynamic equation
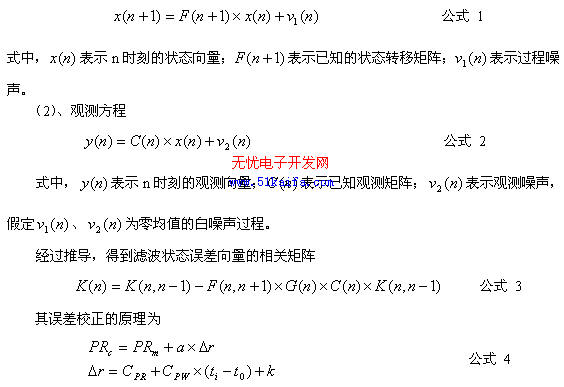
In the formula, PRC is the corrected pseudorange; PRm is the measured pseudorange; a is the weighting coefficient of the pseudorange; â–³ r is the unweighted distance correction value; CPR is the pseudorange correction value measured by the reference station; CPw is the correction value of the pseudorange rate measured by the reference station; TI is the time for measuring the pseudorange; t0 is the reference time for the correction time; k is other errors.
After differential processing, the data positioning accuracy can be guaranteed within 10m to meet the actual application requirements.
5 GPRS wireless link establishment
The GPRS wireless communication module adopts the MC35I of Siemens Company. The establishment of the GPRS wireless communication link includes the two processes of GPRS attachment and PDP context activation. The specific process is described as follows: (1) The vehicle-mounted system sends an AT command to the GPRS wireless communication module to request activation of the IP protocol. The command contains the name of the APN access point to be connected, QOS and other parameters. (2) The mobile terminal sends LCP data frames to set up and negotiate parameters with the network. After the parameter negotiation is completed, the user identity is confirmed through the PAP protocol, and the user ID and password are saved. (3) The mobile terminal sends an IPCP data frame, requesting dynamic allocation of an IP address, and the SGSN sends a request to activate the PDP context. (4) The SGSN requests the DNS server to parse the APN and obtain the IP address of the GGSN corresponding to the APN. The SGSN sends a PDP context request to the selected GGSN. The GGSN authenticates the user, assigns a dynamic IP address to the user after passing, and then returns the PDP context establishment success message to the SGSN. (5) The SGSN sends a PDP activation message to the mobile terminal, and responds to the IP address dynamically assigned to the mobile terminal through the IPCP configuration.
6 Design and architecture of WebGIS system
The WebGIS system is built using Microsoft Visual Studio. NET 2003 + SQL Server 2000 + MapX. The data of the system mainly includes two types of spatial data and attribute data. The spatial data includes the following layers: administrative divisions, residential areas, water systems, highway networks, governments, enterprises, hotels, and the above layers are configured in the Map X data set configuration file Configured in Geoset Manager and saved as rpdh. Gst file; attribute data is stored in SQL Server 2000, including user management table (user ID, user name, password, company name), vehicle information table (vehicle ID, belongs to user, car SIM) -ID, vehicle remark information) and reception information table (vehicle SIM-ID, longitude, latitude, speed, direction, time, etc.).
The WebGIS system architecture is mainly composed of two parts. Including the client and the server, the client only needs the user to install the IE browser, where the client's ZoomView component implements a script that changes the view. The server side is mainly composed of a web server and a GIS WEB server. The web server needs to install Microsoft Asp.Net, which is responsible for the conversation with the client. The GIS WEB server provides GIS functions.
The .NET RemoTIng technology is used for remote calling between the web server and the GIS WEB server. The AcTIveXMessenger component implements the messaging function between the web server and the GIS WEB server. AcTIveXIntermediator is a remote processing object and is also the core of the .NET Remoting technology. , Where ActiveXlntermediator runs on the GIS WEB server, and runs its proxy object on the network server. The GIS WEB server acts as a server in remote calls and provides the function of ActiveX controls; the web server acts as a client in remote calls. Among them, the realization of GIS WEB service WebGIS adopts the newly added Remoting [5] technology of .Net programming environment, which mainly includes ActiveXBroker Group, ActiveXBroker, ActiveXServer, ActiveX components. Among them, ActiveXServer is a container of ActiveX objects. An ActiveXServer contains an ActiveX object. ActiveX implements the function of corresponding ActiveX controls. ActiveXBroker is to realize the initialization of a certain number of ActiveXServer objects when the server service starts, so that each ActiveXServer object runs in a separate thread. Each ActiveXServer object needs to run in a single-threaded apartment.
7. System functions and features
After the system is designed, it mainly has the following functions: (1) Vehicle positioning function. (2) Track playback function. (3) Alarm function. (4) The functions of zooming in, zooming out, roaming, querying etc. of the electronic map.
Compared with similar products, the system has the following advantages: (1) The user is easy to operate, users only need to be able to access the Internet, and then click on the vehicle they want to query, the vehicle will be transmitted to the client in the form of a web page, and you can master yourself Own the location of the vehicle. (2) Platform independence, no matter what machine the server / client is, no matter what GIS software is used on the Web GIS server side, users can transparently access Web GIS data due to the use of a universal Web browser. (3) Use .NET programming technology and universal wintel platform, which is object-oriented and easy to reuse, which brings convenience to the implementation and upgrade of the system, and facilitates system expansion and secondary development.
8 Conclusion
The application of WebGIS technology to vehicle positioning satisfies the customer's need to query the vehicle through the Internet, which lays the foundation for vehicle navigation and dispatch in the Internet environment. The vehicle-mounted embedded platform is based on the universal wintel architecture, which is convenient for the function expansion and upgrade of the vehicle-mounted system. Has certain application prospects.
Intelligent chargers step forward to achieve intelligent, flexible and energy-efficient charging performance.
Intelligent chargers combine all the existing technology benefits and new features that assure better communications with the battery and more flexibility of use. The innovative modular design provides highly efficient charging, reliability and ease of service.
Intelligent Battery Charger,Intelligent Lipo Battery Charger,Guided Vehicle Intelligent Battery Charger,Automation Intelligent Rapid Charger
Xinxiang Taihang Jiaxin Electric Tech Co., Ltd , https://www.chargers.be